Bài trước đã giới thiệu các bạn về hệ tọa của Robot, trong bài này sẽ giới thiệu các bạn về hệ tọa độ của robot UR.
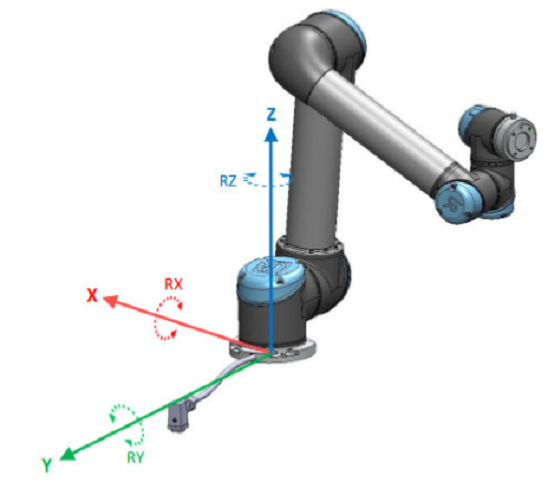
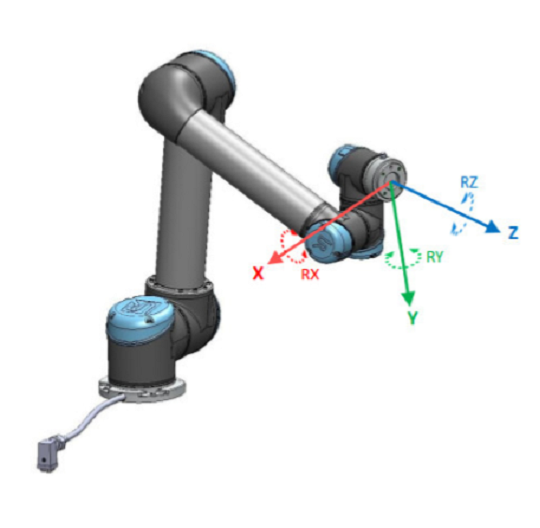
Robot UR gồm có 3 hệ tọa độ là hệ tọa độ Base, hệ tọa độ Tool, hệ tọa độ người dùng các hệ tọa độ này đều tuân theo quy tắc bàn tay phải< Ngón cái trục Z, ngón giữa trục Y, Ngón trỏ - trục Z>
Bài tham khảo: http://tpa-edu.com.vn/tin/he-truc-toa-do-trong-robot
Bài tiếp: http://tpa-edu.com.vn/tin/cac-cach-tao-he-toa-do-cho-robot-ur
—————————————————————–
MỌI THÔNG TIN CHI TIẾT LIÊN HỆ
TRUNG TÂM ĐÀO TẠO TỰ ĐỘNG HÓA TPA - EDU
Địa chỉ trụ sở chính: 189 Phan Trọng Tuệ –Thanh Liệt- Thanh Trì – Hà Nội
Hotline: 1900.571.582 - Mr. Tấn 0979 869479/ 0968 108285
Website: tpa-edu.com.vn






.jpg)

.jpeg)
.jpg)
.jpg)


.jpg)

.jpg)

.png)




















.jpg)