Hệ tọa độ
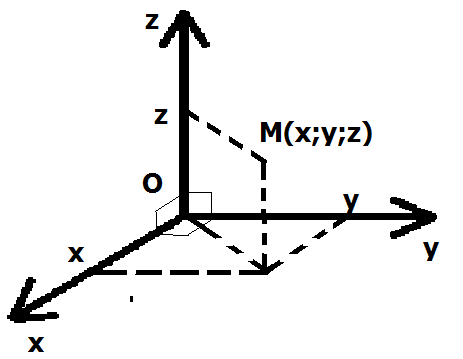
Hệ tọa độ là 1 hệ gồm có 1 điểm làm tâm và xác định các hướng trong hệ tọa độ đó. Để xác định vị trí của 1 điểm trong không gian ta dùng hệ trục tọa độ Descartes O(xyz), Một điểm M bất kì trong không gian được xác định có tọa độ (Xm, Ym, Zm)
Ứng dụng của hệ trục tọa độ trong Robot
Để thực hiện việc gắp một vật trong không gian thì Robot cũng cần phải sử dụng hệ tọa độ để xác định tọa độ hiện tại của tay máy và tọa độ của vật cần gắp để tính toán quãng đường di chuyển.
Khi Robot cần nội suy di chuyển theo đường thẳng, đường cong hay cung tròn thì một hệ tọa độ phải là bắt buộc cần để Robot có thể nội suy chính xác các trục của mình để di chuyển chính xác.
Các hệ trục tọa độ trong Robot
Thông thường trong một Robot có các hệ tọa độ cơ bản sau:






.jpg)

.jpeg)
.jpg)
.jpg)


.jpg)

.jpg)

.png)




















.jpg)