Bài trước đã giới thiệu các bạn về các hệ tọa độ của robot UR, bài này sẽ hướng dẫn các bạn cách tạo hệ tọa độ robot
Có 3 cách để tạo ra một hệ tọa độ mới cho robot lần lượt là dựa trên Point, Line, Plane
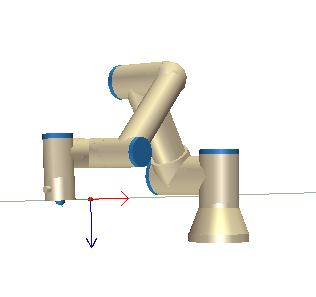
Cách 1: Tạo hệ tọa độ robot dựa trên 1 điểm Point, đặc điểm của phương pháp này điểm Point chính là gốc của hệ tọa độ, còn các trục X,Y, Z sẽ copy theo hệ tọa độ của TCP sử dụng
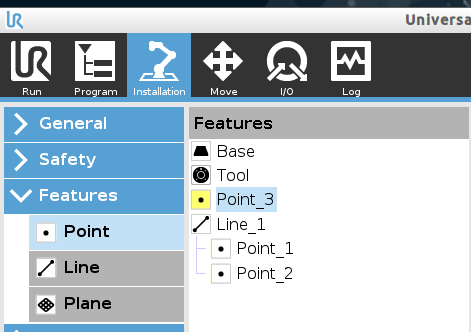
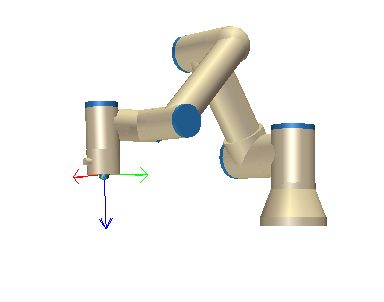
Hệ tọa độ tạo ra có chiều dương các trục trùng với TCP
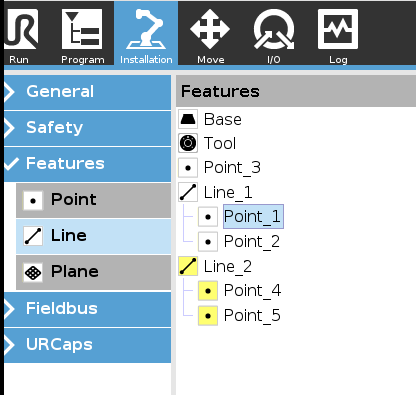
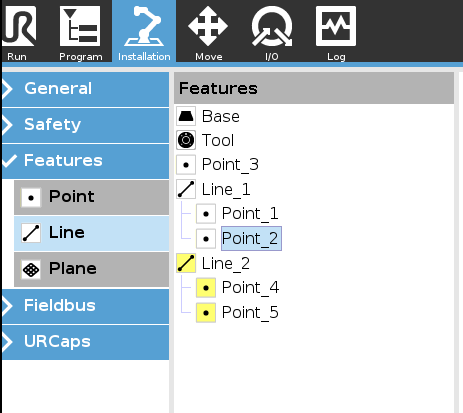
Cách 2: Tạo hệ tọa độ dựa trên 2 điểm < Line>, đặc điểm của phương pháp này là điểm đầu tiên chính là điểm gốc của hệ tọa độ điểm thứ 2 chính là chiều dương của trục Y, chiều Z của trục Z trùng với chiều dương của trục Z TCP đang sử dụng
Cách 3: Tạo hệ tọa dộ dựa trên Plane, đặc điểm ccuar hệ tọa độ này là độc lập với hệ tọa độ của TCP sử dụng< Hướng dẫn bằng videoplane 2>
Bài tham khảo: http://tpa-edu.com.vn/tin/he-truc-toa-do-trong-robot
—————————————————————–
MỌI THÔNG TIN CHI TIẾT LIÊN HỆ
TRUNG TÂM ĐÀO TẠO TỰ ĐỘNG HÓA TPA - EDU
Địa chỉ trụ sở chính: 189 Phan Trọng Tuệ –Thanh Liệt- Thanh Trì – Hà Nội
Hotline: 1900.571.582 - Mr. Tấn 0979 869479/ 0968 108285
Website: tpa-edu.com.vn






.jpg)

.jpeg)
.jpg)
.jpg)


.jpg)

.jpg)

.png)




















.jpg)