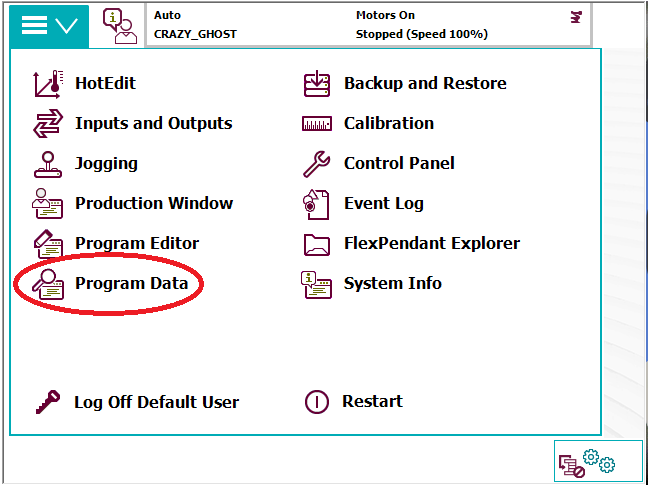
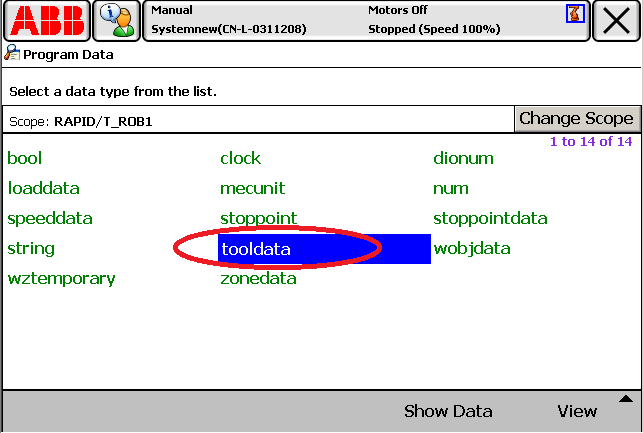
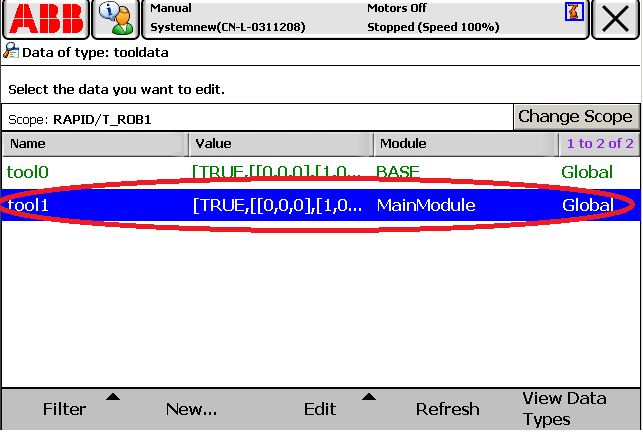
Bước 1: Chọn Program Data từ ABB Menu, chọn tiếp tooldata
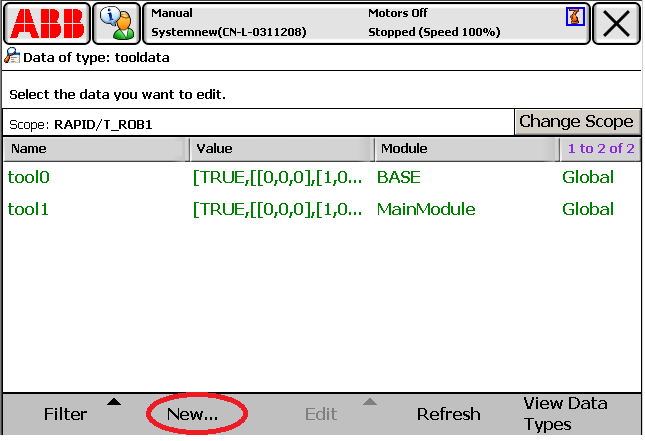
Bước 2: Chọn New để tạo TCP mới, sau đó đổi tên và ấn OK để xác nhận.
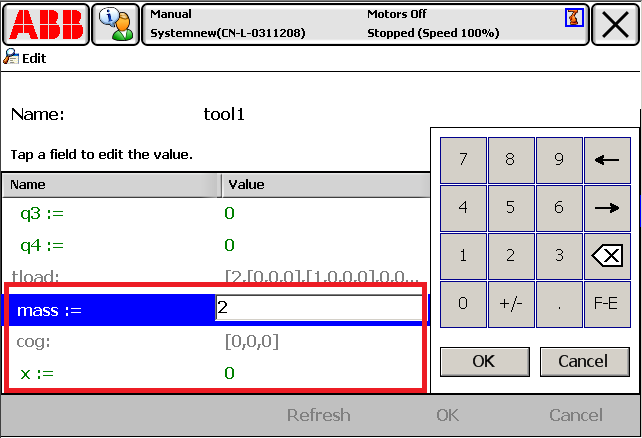
Bước 3:
Ấn vào tool vừa tạo để thay đổi giá trị Mass và cog.
Mass: nhập vào trọng lượng của tool.
Cog: nhập vào thông số x,y,z là tọa độ điểm trọng tâm của tool
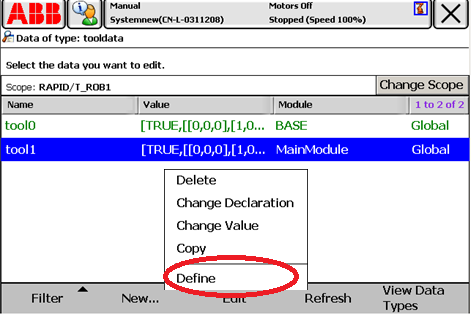
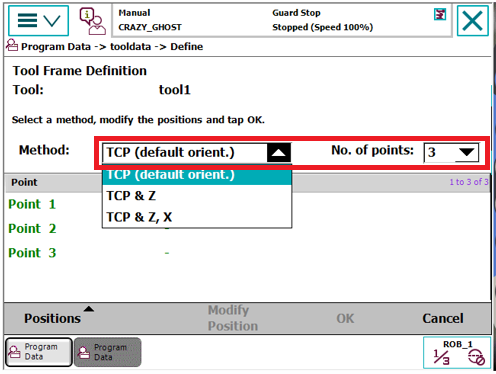
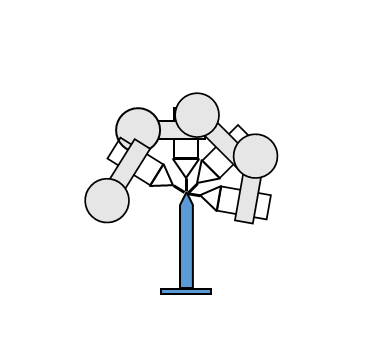
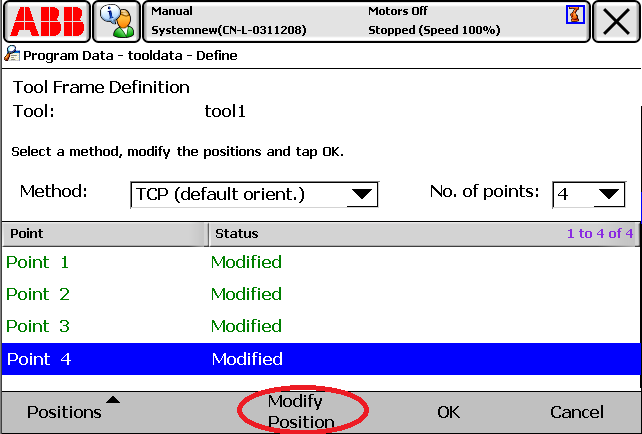
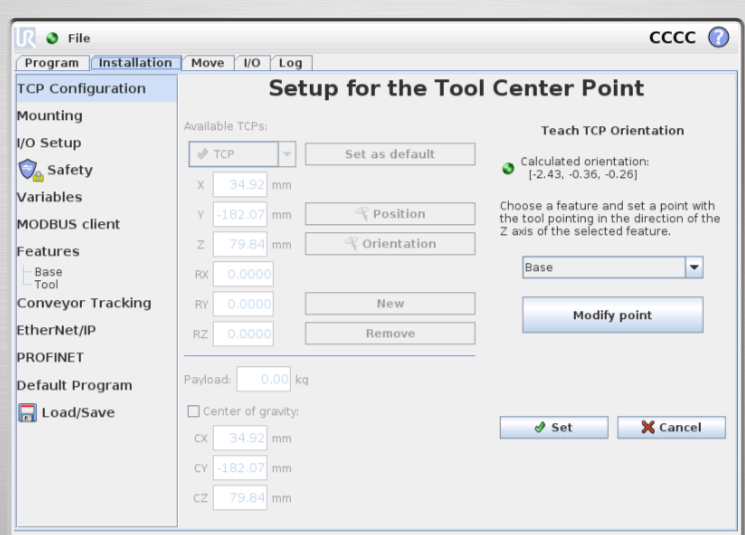
Lấy 1 điểm cố định trong không gian, ở đây ta có đỉnh của 1 vật nhọn màu xanh. Sau đó di chuyển TCP của Robot đến vị trí đó. Sau mỗi lần di chuyển ta chọn Modify Positon. Lặp lại số lần trên bằng với số điểm dạy TCP mà chúng ta đã chọn ở trên. Sau đó ấn OK là bạn đã hoàn thành thiết lập TCP mới cho Robot
Lưu ý:
Vị trí tiếp xúc của TCP Robot và điểm cố định có sai số nhỏ nhất để Robot nhận biết được điểm TCP chính xác.
Sau mỗi lần Modify Position phải di chuyển TCP Robot sang các góc quay trục khác nhau. Nếu góc quay trục sau các lần Modify càng lớn thì Robot tính toán điểm TCP càng chính xác.






.jpg)

.jpeg)
.jpg)
.jpg)


.jpg)

.jpg)

.png)




















.jpg)