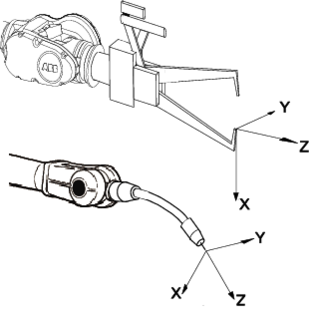
Hệ trục tọa độ trong Robot
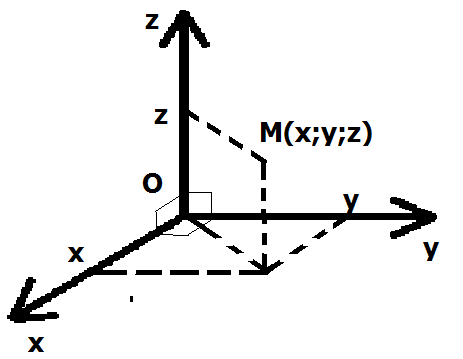
Hệ tọa độ là 1 hệ gồm có 1 điểm làm tâm và xác định các hướng trong hệ tọa độ đó. Để xác định vị trí của 1 điểm trong không gian ta dùng hệ trục tọa độ Descartes O(xyz), Một điểm M bất kì trong không gian được xác định có tọa độ (Xm, Ym, Zm)