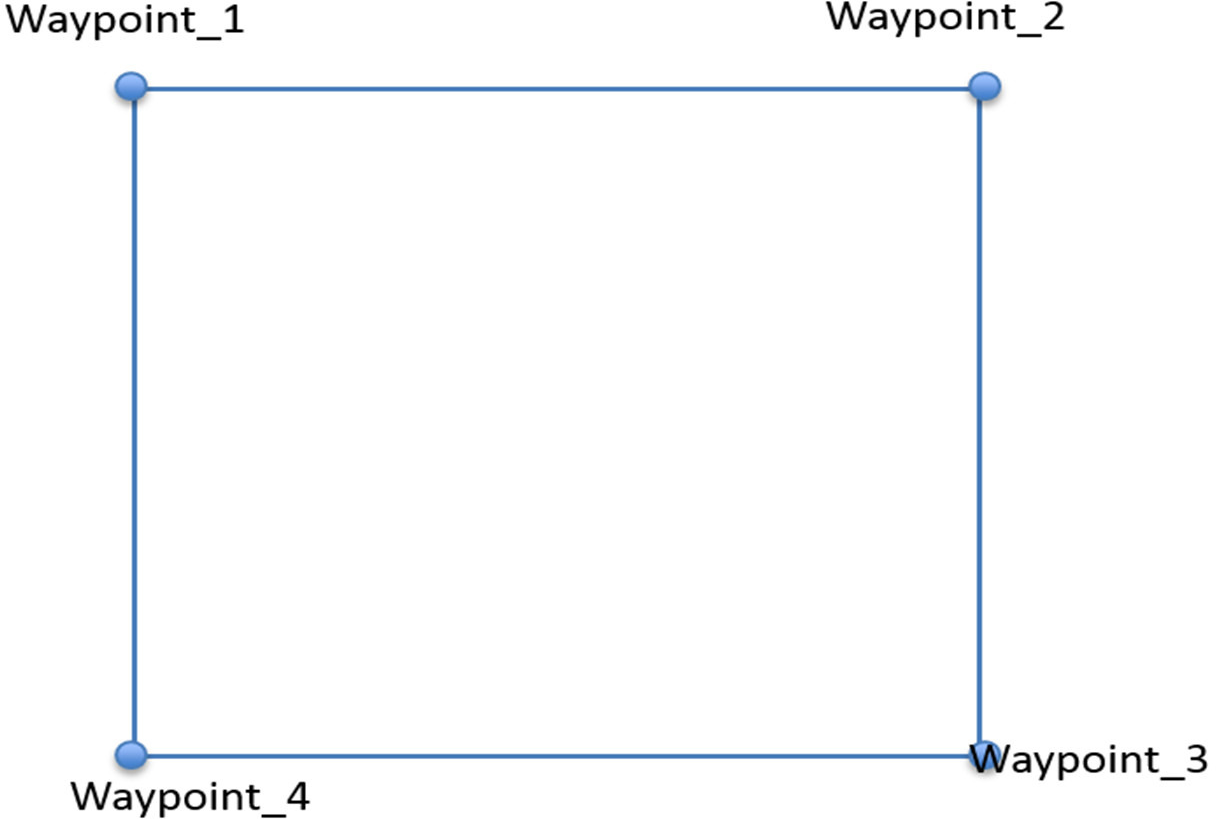
Lệnh Robot di chuyển theo đường thẳng
Trong không gian bị e hẹp về diện tích, khi di chuyển robot có thể bị va chạm với những vật ở xung quanh thì đường di chuyển của nó rất quan trọng. Hoặc khi ta muốn gia công một vật nào đó có biên dạng đường thẳng hay phương án để tiết kiệm quãng đường di chuyển đến điểm nào đó thì hãy lựa chọn lệnh di chuyển MoveL.
Trong kiểu di chuyển này Robot sẽ nội suy các trục của mình sao cho TCP di chuyển trong không gian tạo thành một đường thẳng.
Cú pháp: MoveL Position, v1000, z10, tool0;
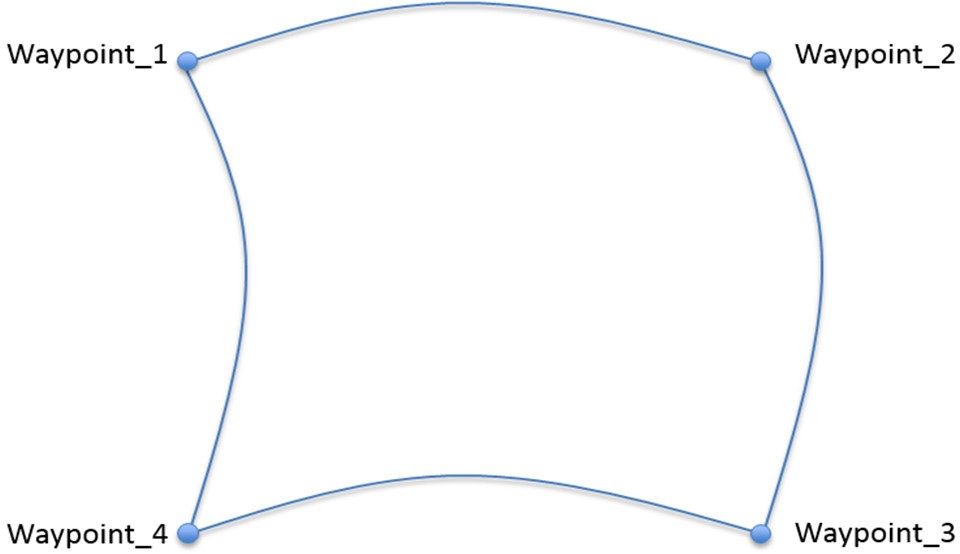
Lệnh Robot di chuyển theo đường cong
Khác với lệnh di chuyển theo đường thẳng, khi không quan trọng về đường đi của TCP, ta sẽ lựa chọn cách di chuyển này. Ở chế độ này các trục của Robot sẽ được quay tự do nhưng vẫn đãm bảo được TCP đến chính xác điểm yêu cầu. Chính lợi thế này lệnh di chuyển đường cong MoveJ có thể di chuyển đến nhưng điểm mà lệnh MoveL không thể đến được.
Cú pháp: MoveJ Position, v1000, z10, tool0;
Trong đó: Position: là điểm đích có tọa độ x,y,z
V1000: là tốc độ di chuyển của TCP
Z10: vùng di chuyển
Tool0: Tool được lựa chọn để di chuyển.
—————————————————————–
MỌI THÔNG TIN CHI TIẾT LIÊN HỆ
TRUNG TÂM ĐÀO TẠO TỰ ĐỘNG HÓA TPA - EDU
Địa chỉ trụ sở chính: 189 Phan Trọng Tuệ –Thanh Liệt- Thanh Trì – Hà Nội
Hotline: 1900.571.582 - Mr. Tấn 0979 869479/ 0968 108285
Website: tpa-edu.com.vn






.jpg)

.jpeg)
.jpg)
.jpg)


.jpg)

.jpg)

.png)




















.jpg)